Программный
блок перемещения
Используйте этот блок для настройки движения вашего
робота в прямолинейном направлении вперед или назад или для выполнения
поворотов при движении по криволинейной траектории. Задайте дальность
перемещения вашего робота, используя характеристику «Продолжительность».

1.
Буквы в правом верхнем углу блока показывают, какие из
портов устройства NXT будут контролироваться.
2.
Эта пиктограмма показывает направление движения
робота.
3.
Пиктограмма показывает уровень мощности. Скорость
робота может также зависеть от прочих условий, например поверхности, по которой
он движется, а также движения в гору или под гору.
4.
Пиктограмма показывает, какое значение установлено для
характеристики «Продолжительность»: неограниченный, градусы, обороты или секунды.

1.
Пиктограмма показывает, что для характеристики
«Направление» установлено значение «Остановить». При этом значении все
электродвигатели останавливаются.
Настройка
Программного блока перемещения
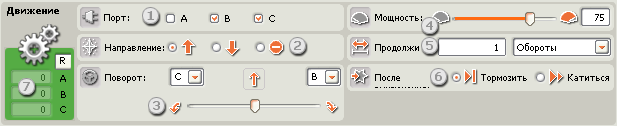
1.
Выберите электродвигатели, которыми нужно управлять. В
случае управления двумя электродвигателями (пример: B и C) они синхронизируются
и вращаются вперед или назад с одинаковой мощностью. Если выбрать три
электродвигателя, то синхронизируются электродвигатели B и C.
2.
Выберите, будет ли электродвигатель вращаться вперед,
назад или остановится. При выборе значения «Остановить» электродвигатели также
сбрасываются. (См. также файл о Программном блоке сброса электродвигателя.)
3.
Если для управления машиной используются два
электродвигателя (по одному с каждой стороны), то отображается бегунок рулевого
управления, на каждой стороне которого указываются буквы выбранных портов. Для
задания непрямого перемещения робота переместите бегунок. Если бегунок
находится у одного из концов, то машина вращается на месте.
4.
Этот бегунок и изменяемое окно ввода позволяют задать
уровень мощности [0-100 %].
5.
В раскрывающемся меню «Продолжительность» задайте
работу электродвигателя в течение неограниченного времени либо задайте
предельное число секунд, оборотов [установлено по умолчанию] или градусов.
Параметры «Время», «Обороты» или «Градусы» позволяют изменять расстояние, на
которое перемещается робот. (См. совет ниже.)
6.
Выберите, будут ли электродвигатели тормозить или
двигаться накатом по завершении работы. Если робот должен остановиться в
конкретном положении, то выберите торможение электродвигателей. Выбор
торможения электродвигателей также предотвратит медленное съезжание робота под
гору, однако при такой настройке быстрее расходуется заряд батареек устройства
NXT, поскольку электродвигатели работают, удерживая робота на месте.
7.
Программные блоки обратной связи считают, на сколько
градусов или полных оборотов вращаются электродвигатели. Нажмите кнопку сброса
для обнуления значений. (Чтобы гарантировать получение обратной связи,
убедитесь в том, что двигатели подключены к выбранным портам и что установлена
связь с устройством NXT.)